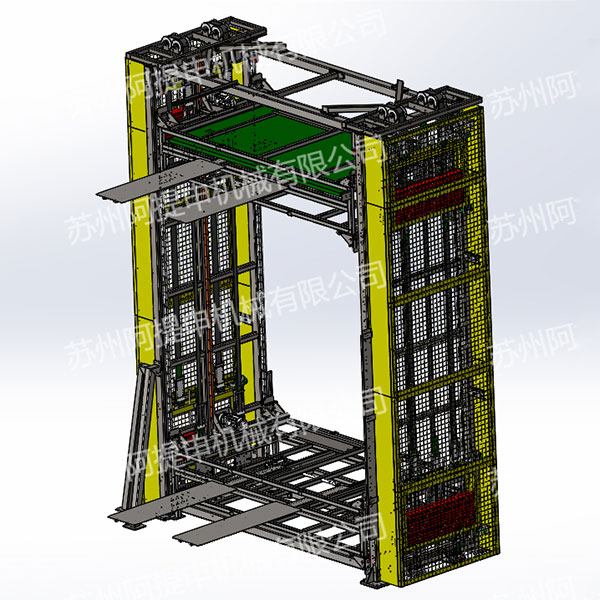




Автономная серия оборудования – Паллетайзер автоматический

ООО Сучжоу Атишэнь Машиностроение
Провинция Цзянсу, город Сучжоу, город Тайцан, Северная улица Синъе, дом 399
Описание продукта
Информация о компании





Отправить сообщение этому магазину
ООО Сучжоу Атишэнь Машиностроение
Провинция Цзянсу, город Сучжоу, город Тайцан, Северная улица Синъе, дом 399
Соответствующие товары
-
 Фланцы под свободное кольцо Класс 400
Фланцы под свободное кольцо Класс 400 -
 Аварийная спасательная машина для дренажа
Аварийная спасательная машина для дренажа -
 Аварийно-спасательная машина для наводнений большой производительности
Аварийно-спасательная машина для наводнений большой производительности -
 Мобильные дренажные спасательные машины
Мобильные дренажные спасательные машины -
 Электрический водонасос Dewater QQ600-8 для водоотведения
Электрический водонасос Dewater QQ600-8 для водоотведения -
 Насос для откачки воды Dewater QQ1000-10 для борьбы с наводнениями
Насос для откачки воды Dewater QQ1000-10 для борьбы с наводнениями -
 Высокопроизводительный электрический водяной насос Dewater QQ1000-20
Высокопроизводительный электрический водяной насос Dewater QQ1000-20 -
 Высоконапорный водяной насос Dewater QQ150-35
Высоконапорный водяной насос Dewater QQ150-35